


La exploración espacial moderna enfrenta el desafío de proteger a los astronautas de factores hostiles como la radiación cósmica, los micrometeoritos y las fluctuaciones extremas de temperatura. Una de las soluciones técnicas más viables es la construcción de asentamientos dentro de tubos de lava, estructuras subterráneas naturales presentes en la Luna y Marte. Para viabilizar estos proyectos, agencias como la NASA evalúan la integración de tecnologías comerciales avanzadas de navegación autónoma, un área donde las pruebas terrestres con sistemas cuadrúpedos están demostrando cómo se pueden mapear entornos hostiles sin intervención humana directa.
El rol de Spot en el mapeo de entornos subterráneos complejos
El Departamento de Transporte de Texas (TxDOT) completó recientemente un proyecto técnico de alta precisión al escanear de manera integral más de 5,5 millas de la Inner Space Cavern. Durante un periodo de 18 días distribuidos en cuatro meses, los especialistas utilizaron el robot cuadrúpedo Spot, desarrollado por Boston Dynamics, para recolectar datos geoespaciales en zonas de difícil acceso. La plataforma robótica demostró su capacidad para desplazarse de manera estable sobre terrenos irregulares y resbaladizos, transportando sensores ópticos y sistemas de medición avanzados sin alterar la estructura natural de la cueva.
Desde una perspectiva técnica, el éxito de esta misión radica en el acoplamiento de cargas útiles de escaneo láser LiDAR sobre el chasis dinámico del robot. Este sistema genera nubes de puntos tridimensionales con precisión milimétrica, lo que permite construir modelos digitales detallados del subsuelo. Esta misma metodología de teledetección y locomoción sobre superficies no estructuradas es la que requiere la NASA para evaluar la estabilidad estructural de los vacíos subterráneos antes de enviar misiones tripuladas al espacio profundo.

Tubos de lava como blindaje natural en la Luna y Marte
Los tubos de lava se forman durante erupciones volcánicas antiguas, cuando la capa externa de un flujo de lava se enfría y solidifica, mientras el interior derretido sigue fluyendo y finalmente se vacía. En entornos de baja gravedad como el satélite terrestre, estas estructuras alcanzan dimensiones significativamente mayores que las terrestres, con diámetros que pueden superar los cientos de metros. Científicos del Jet Propulsion Laboratory (JPL) destacan que estas cavidades ofrecen un excelente factor de protección frente al regolito superficial, actuando como un escudo térmico y físico constante.
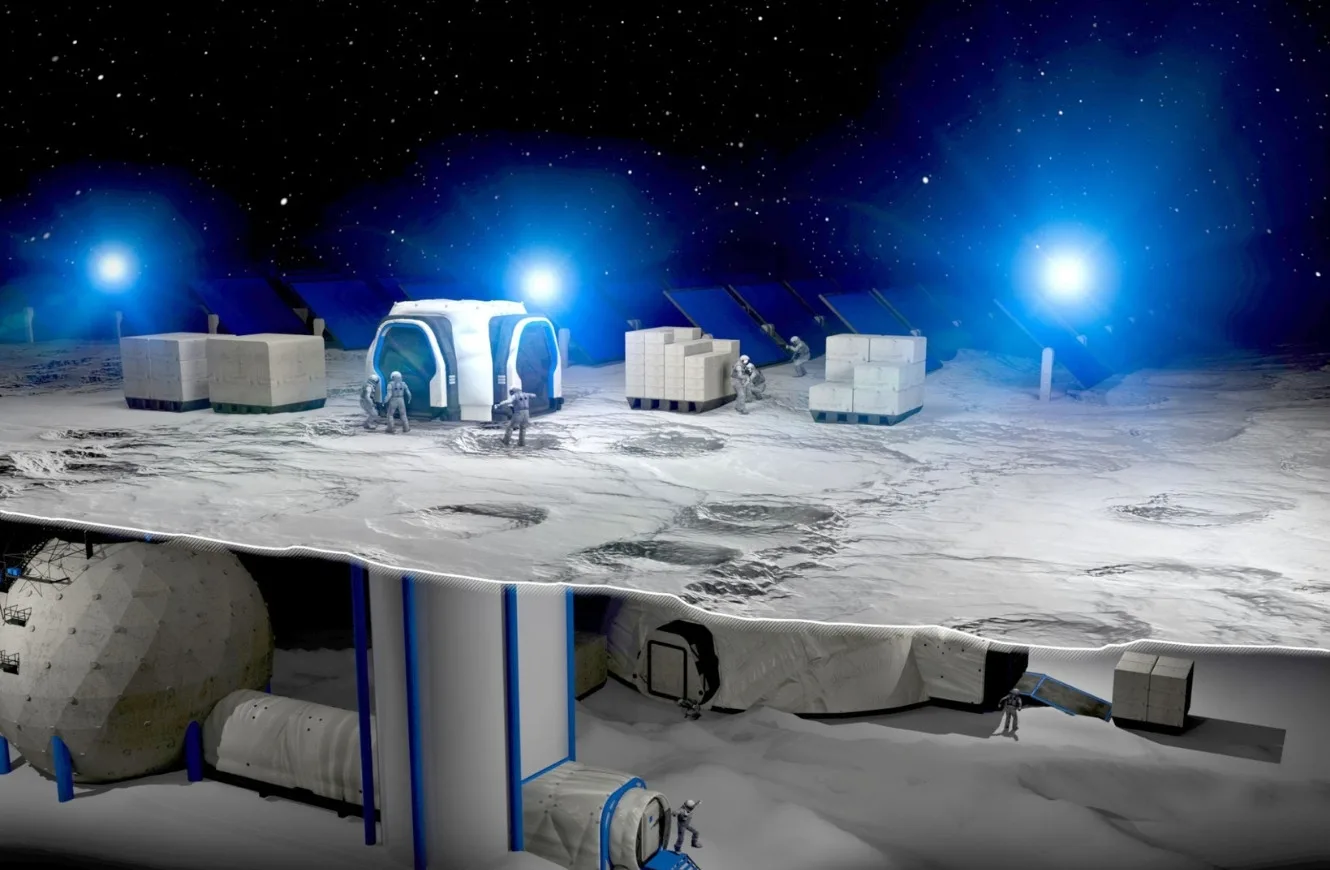
La principal ventaja de establecer una NASA MoonBase en el interior de estos túneles es el aislamiento contra la radiación ionizante y las temperaturas superficiales, que en la Luna oscilan entre los 120 °C durante el día y los -130 °C por la noche. Al albergar módulos habitables inflables o estructuras impresas en 3D dentro del tubo, la ingeniería aeroespacial reduce la necesidad de desarrollar materiales de blindaje masivos y costosos de transportar desde la Tierra. No obstante, el acceso a estas estructuras requiere un reconocimiento topográfico previo que solo la robótica autónoma puede ejecutar.
Adaptación de capacidades comerciales para la exploración espacial
La transición de un sistema robótico comercial diseñado para la industria terrestre hacia una misión de exploración en el marco del Programa Artemis exige modificaciones de ingeniería específicas. Los ingenieros deben adaptar los sistemas de lubricación y gestión térmica de los componentes mecánicos para que operen en condiciones de vacío severo y polvo abrasivo. Sin embargo, la arquitectura de control y los algoritmos de localización y mapeo simultáneos (SLAM) desarrollados por Boston Dynamics constituyen una base de software sumamente sólida para la navegación autónoma en la oscuridad absoluta de los fosos lunares.
El uso de sistemas de patas en lugar de ruedas proporciona una ventaja mecánica crítica al explorar terrenos colapsados o cubiertos de escombros basálticos, comunes en las entradas de los tubos de lava o skylights. Al procesar la retroalimentación de fuerza en tiempo real en cada extremidad, el software del dispositivo calcula la estabilidad del suelo antes de transferir su peso. Esta capacidad de análisis predictivo minimiza el riesgo de pérdida de la unidad, garantizando el retorno de los datos críticos de habitabilidad para las futuras tripulaciones estacionales fuera de nuestro planeta.
Te puede interesar: Astrobotic revela a Griffin-1, el módulo lunar que NASA usará para llevar carga a la Luna